Green’s Functions#
This page provides an overview of the approach to calbriate ocean general circulation models using Green’s functions. The outline here largely follows Section 2 of Menemenlis, Fukumori, and Lee [2005].
To provide a concrete example of the approach, I provide details for estimating parameters in a simple physics example: the height of a projectile thrown from a platform.
To begin, the import the numpy and matplotlib libraries:
import numpy as np
import matplotlib.pyplot as plt
The True Function#
The true function \(\textbf{x}^t(t)\) represents the real physics process that the model is trying to capture. For the ocean model example, this function yields 3D fields of temperature, salinity, velocity, and other other parameters pertinent to the ocean.
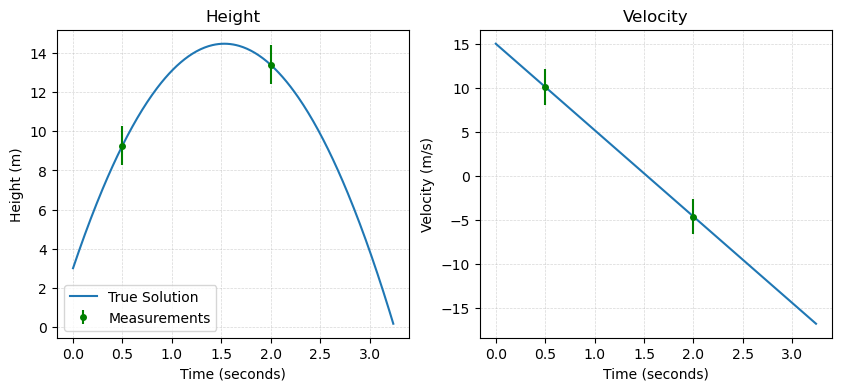
In the example for this notebook, \(\textbf{x}^t(t)\) is a one-dimensional function representing the height of a ball thrown from a platform with an initial height of \(h_0 = 3\) m, an initial velocity of \(v_0 = 15\) m/s, and on a planet with a gravitational acceleration of \(g=-9.8\) m/s\(^2\). Friction in the air is neglected for this example. From physics and calculus, this function has a simple, quadratic form:
We can define this function for computations as follows:
# define the true constants
h_0_t = 3
v_0_t = 15
g_t = -9.8
# define the time
delta_t = 0.01
t_max = (-v_0_t - np.sqrt(v_0_t**2-2*g_t*h_0_t))/g_t
t = np.arange(0,t_max,delta_t)
# define the true solution
x_true = h_0_t + v_0_t*t + g_t/2*(t**2)
v_true = v_0_t + g_t*t
In the optimization problem, a model \(M\) is optimized to best fit a set of observational data \(\textbf{y}^O\) which is a function of the true solution. In the ocean, \(\textbf{y}^O\) may correspond to data from satellites or in situ observations. The mapping from the true physical space to the data \(H\) can be expressed as
where \(\boldsymbol\varepsilon\) are the errors associated with the measurements. The errors are assumed to have zero mean and covariance matrix \(\textbf{R}\).
For our projectile example, we can assume that we are able to make observations of our projectile at times \(t=0.5\) seconds and \(t=2\) seconds. At each of these times, we can observe both the position \(x\) and the velocity \(v\) of the projectile. In this case, we can organize our measurements into a data array as
We can define this measurement function as follows:
def H(t, v, x):
data = np.zeros((4,))
# two times
t_0 = np.argmin(np.abs(t-0.5))
t_1 = np.argmin(np.abs(t-2))
# two position measurements
data[0] = x[t_0]
data[1] = x[t_1]
# two velocity measurements
data[2] = v[t_0]
data[3] = v[t_1]
return(data)
Then, the measurement data can then be computed with our function:
y_O = H(t, v_true, x_true)
# uncertainties
x_sigma = 1
v_sigma = 2
# these lines can be used to add some error to the data, if interested
np.random.seed(9) # seed for reproducibility
# y_O[0] += np.random.normal(0,x_sigma)
# y_O[1] += np.random.normal(0,x_sigma)
# y_O[2] += np.random.normal(0,v_sigma)
# y_O[3] += np.random.normal(0,v_sigma)
print('The observational data is: ', y_O)
The observational data is: [ 9.275 13.4 10.1 -4.6 ]
In this example, I will assume that all errors are entirely uncorrelated such that \(\textbf{R}\) is the identity matrix:
R = np.identity(4)
We can visualize the solution and our sampled data as follows:
fig = plt.figure(figsize=(10,4))
plt.subplot(1,2,1)
plt.plot(t, x_true, label='True Solution')
plt.errorbar(0.5, y_O[0], yerr=x_sigma, fmt='.', color='green', label='Measurements', markersize=8)
plt.errorbar(2, y_O[1], yerr=x_sigma, fmt='.', color='green', markersize=8)
plt.title('Height')
plt.legend()
plt.grid(linestyle='--', linewidth=0.5, alpha=0.5)
plt.xlabel('Time (seconds)')
plt.ylabel('Height (m)')
plt.subplot(1,2,2)
plt.plot(t, v_true)
plt.errorbar(0.5, y_O[2], yerr=v_sigma, fmt='.', color='green', markersize=8)
plt.errorbar(2, y_O[3], yerr=v_sigma, fmt='.', color='green', markersize=8)
plt.title('Velocity')
plt.grid(linestyle='--', linewidth=0.5, alpha=0.5)
plt.xlabel('Time (seconds)')
plt.ylabel('Velocity (m/s)')
plt.show()
The Modeled Solution#
Ocean models are used to estimate the true function \(\textbf{x}^t(t)\) with an estimated function is \(\textbf{x}^f(t)\) using a model timestepping scheme \(M_i\) such that
For the projectile example, we can write this explicitly as
where the first line is the position of the projectile and the second represents the velocity.
For the projectile, we can define the model \(M\) in terms of the initial conditions \(h_0\) and \(v_0\) and the gravity parameter \(g\) as follows:
def M(t, delta_t, h_0, v_0, g):
# compute the number of timesteps
n_timesteps = np.size(t)
# make empty arrays to store the solution
x = np.zeros((n_timesteps,))
v = np.zeros((n_timesteps,))
# start the solutions with the initial conditions
x[0] = h_0
v[0] = v_0
# loop through the entire time array
for i in range(n_timesteps-1):
# estimate the next velocity
v[i+1] = v[i] + g * delta_t
# estimate the next position
x[i+1] = x[i] + (v[i+1]+v[i])/2*delta_t
return(v, x)
Visualizing the Solution#
To visualize how the function above is utilized, consider a scenario where we have some preliminary guesses for \(h_0\), \(v_0\) and \(g\) which differ from the true values. We can construct this model solution using our function as follows:
# model parameters - first guess
h_0 = 2
v_0 = 17
g = -10
# define a time for the model
delta_t_model = 0.1
t_model = np.arange(0,t_max,delta_t_model)
# compute an estimated solution
v_estimated, x_estimated = M(t_model, delta_t_model, h_0, v_0, g)
Next, we compare our preliminary solution with the true solution:
fig = plt.figure(figsize=(10,4))
plt.subplot(1,2,1)
plt.plot(t, x_true, label='True Solution')
plt.plot(t_model, x_estimated, 'k.', label='Estimated Solution')
plt.errorbar(0.5, y_O[0], yerr=x_sigma, fmt='.', color='green', label='Measurements', markersize=8)
plt.errorbar(2, y_O[1], yerr=x_sigma, fmt='.', color='green', markersize=8)
plt.title('Height')
plt.legend()
plt.grid(linestyle='--', linewidth=0.5, alpha=0.5)
plt.xlabel('Time (seconds)')
plt.ylabel('Height (m)')
plt.subplot(1,2,2)
plt.plot(t, v_true)
plt.plot(t_model, v_estimated, 'k.', label='Estimated Solution')
plt.errorbar(0.5, y_O[2], yerr=v_sigma, fmt='.', color='green', markersize=8)
plt.errorbar(2, y_O[3], yerr=v_sigma, fmt='.', color='green', markersize=8)
plt.title('Velocity')
plt.grid(linestyle='--', linewidth=0.5, alpha=0.5)
plt.xlabel('Time (seconds)')
plt.ylabel('Velocity (m/s)')
plt.show()
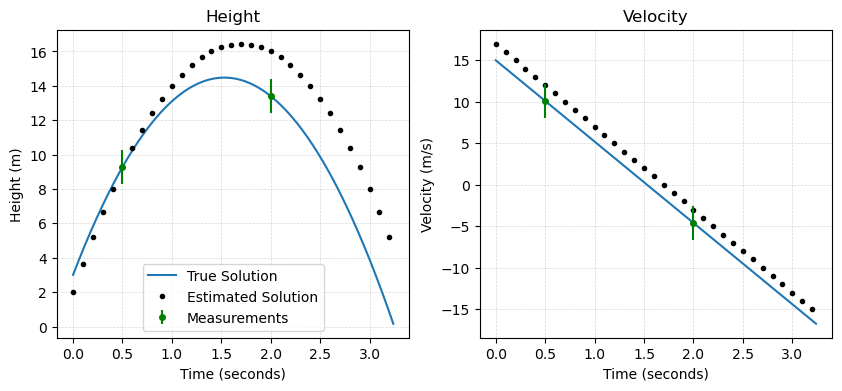
As we can see in the plots above, our model solution clearly differs from the true solution. More importantly, our model solution different from the measurements made of the projectile in both position and velocity.
The data-model differences \(\textbf{y}^d\) can be computed with the same measurement function defined above where here, we now pass in the estimated model parameters:
y = H(t_model, v_estimated, x_estimated)
y_d = y_O - y
print('Model errors:',y_d)
Model errors: [ 0.025 -2.6 -1.9 -1.6 ]
Optimizing the model parameters#
Next, in the Green’s function approach, we use the errors between the data and the model solution to “tune” the model parameters to best fit the data. The model is assumed to have some errors relative to the true solution \(\textbf{x}^t(t_{i+1})\) resulting from uncertain parameters \(\boldsymbol\mu\), i.e.
where the parameters in \(\boldsymbol\mu\) can be used as controls to bring the model closer to observations. The controls are assummed to have zero mean and a covariance matrix \(\textbf{Q}\).
In the case of the projectile example, we can construct a perturbation vector that includes peturbations \(e_j\) to the parameters \(h_0\), \(v_0\), and \(g\), i.e.
In other words, we will search for adjustments to these parameters such that the model better matches the data.
For this example, I will assume all parameters are entirely uncorrelated so that \(\textbf{Q}\) is the identity matrix:
Q = np.identity(3)
In the Green’s function approach to optimizing the parameters, a function \(G(\boldsymbol\mu)\) is defined which is the convolution of the measurement function \(H\) with the model \(M\). With this function,
In the Green’s function approach, the following cost function is minimized:
To minimize the cost function, it is assumed that the function \(G\) can be linearized, i.e.
where \(\boldsymbol\mu = \textbf{0}\) represents a baseline simulation with a given set of parameters. With this approximation, the data-model differences can be expressed as
\(G\) is computed using a set of experiments where each parameter in \(\boldsymbol\mu\) to optimize is perturbed with perturbation \(e_j\). Then, the columns of \(\textbf{G}\) are computed as:
In this example, we will carry out three perturbation experiments by selecting three random perturbations for each parameter.
The summary of perturbations is given by the following table:
Column |
Parameter |
Perturbation |
|---|---|---|
\(\textbf{G}_{(0)}\) |
\(h_0\) |
+0.5 m |
\(\textbf{G}_{(1)}\) |
\(v_0\) |
-0.2 m/s |
\(\textbf{G}_{(2)}\) |
\(g\) |
-0.5 m/s\(^2\) |
The \(\textbf{G}\) matrix for this experiment is computed as follows:
# define the perturbations
e_0 = 0.5
e_1 = -0.2
e_2 = -0.5
# run the perturbation experiments
v_est_0, x_est_0 = M(t_model, delta_t_model, h_0+e_0, v_0, g)
v_est_1, x_est_1 = M(t_model, delta_t_model, h_0, v_0+e_1, g)
v_est_2, x_est_2 = M(t_model, delta_t_model, h_0, v_0, g+e_2)
# sample the perturbation experiments at the data locations
y_0 = H(t_model, v_est_0, x_est_0)
y_1 = H(t_model, v_est_1, x_est_1)
y_2 = H(t_model, v_est_2, x_est_2)
The matrix \(\textbf{G}\) is:
# compute G
g0 = (y_0 - y)/e_0
g1 = (y_1 - y)/e_1
g2 = (y_2 - y)/e_2
G = np.column_stack([g0, g1, g2])
print(G)
[[1. 0.5 0.125]
[1. 2. 2. ]
[0. 1. 0.5 ]
[0. 1. 2. ]]
Using this matrix and the covariance matrices \(\textbf{R}\) and \(\textbf{Q}\), the uncertainty covariance matrix can be computed as
P = np.linalg.inv(np.linalg.inv(Q) + np.transpose(G) @ np.linalg.inv(R) @ G)
and the optimized parameters are given by
eta_soln = P @ np.transpose(G) @ np.linalg.inv(R) @ y_d
This vector contains the perturbations for each of the parameters in the perturbation experiments and can be used to find the optimized model parameters, i.e.
# compute the optimized parameters
h_0_opt = h_0 + eta_soln[0]
v_0_opt = v_0 + eta_soln[1]
g_opt = g + eta_soln[2]
print('After the optimization, the parameters are as follows:')
print(' h_0: '+'{:.4f}'.format(h_0_opt)+' m')
print(' v_0: '+'{:.4f}'.format(v_0_opt)+' m/s')
print(' g: '+'{:.4f}'.format(g_opt)+' m/s^2')
After the optimization, the parameters are as follows:
h_0: 2.1684 m
v_0: 16.1410 m/s
g: -10.4390 m/s^2
With these new parameters, the optimized model can be computed and compared with the true solution:
# compute the optimized model
v_opt, x_opt = M(t_model, delta_t_model, h_0_opt, v_0_opt, g_opt)
fig = plt.figure(figsize=(10,4))
plt.subplot(1,2,1)
plt.plot(t, x_true, label='True Solution')
plt.plot(t_model, x_opt, '.',label='Optimized Solution')
plt.plot(t_model, x_estimated, 'k.', label='Estimated Solution')
plt.errorbar(0.5, y_O[0], yerr=x_sigma, fmt='.', color='green', label='Measurements', markersize=8)
plt.errorbar(2, y_O[1], yerr=x_sigma, fmt='.', color='green', markersize=8)
plt.title('Height')
plt.legend()
plt.grid(linestyle='--', linewidth=0.5, alpha=0.5)
plt.xlabel('Time (seconds)')
plt.ylabel('Height (m)')
plt.subplot(1,2,2)
plt.plot(t, v_true)
plt.plot(t_model, v_opt, '.', label='Optimized Solution')
plt.plot(t_model, v_estimated, 'k.', label='Estimated Solution')
plt.errorbar(0.5, y_O[2], yerr=v_sigma, fmt='.', color='green', markersize=8)
plt.errorbar(2, y_O[3], yerr=v_sigma, fmt='.', color='green', markersize=8)
plt.title('Velocity')
plt.grid(linestyle='--', linewidth=0.5, alpha=0.5)
plt.xlabel('Time (seconds)')
plt.ylabel('Velocity (m/s)')
plt.show()
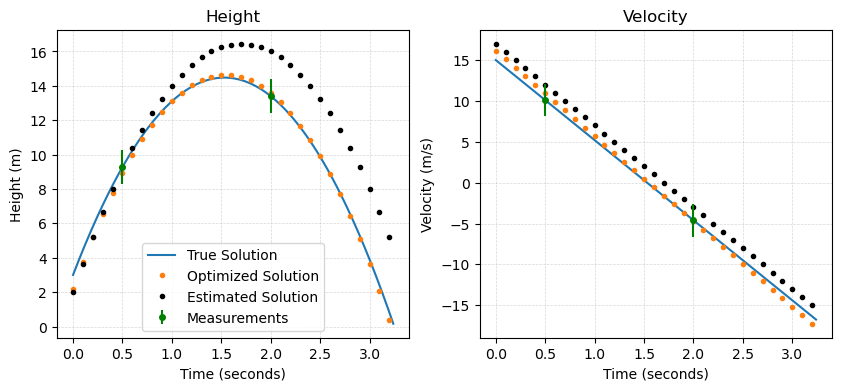
As we can see from this comparison, the solution is much closer to the true solution with the optimized parameters!
Green’s Functions in an Iterative Process#
As we saw in the example above, the optimized parameters provided an set of parameters that yielded an improved fit to observation. However, the model did not perfectly reproduce the true solution.
This approach can also be used in an iterative process to provide further improvements in the parameters. Begin by defining a function to run the Green’s function approach above that can be leveraged in an iterative process:
def Greens_function_optimization(t_model, v_estimated, x_estimated):
# compute model data differences
data = H(t_model, v_estimated, x_estimated)
y_d = y_O - data
# define some perturbations
# np.random.seed(3)
e_0 = np.random.normal(0,1)
e_1 = np.random.normal(0,1)
e_2 = np.random.normal(0,1)
# run the perturbation experiments
v_est_0, x_est_0 = M(t_model, delta_t_model, h_0+e_0, v_0, g)
v_est_1, x_est_1 = M(t_model, delta_t_model, h_0, v_0+e_1, g)
v_est_2, x_est_2 = M(t_model, delta_t_model, h_0, v_0, g+e_2)
# sample the perturbation experiments at the data locations
data_0 = H(t_model, v_est_0, x_est_0)
data_1 = H(t_model, v_est_1, x_est_1)
data_2 = H(t_model, v_est_2, x_est_2)
# compute the G matrix
g0 = (data_0 - data)/e_0
g1 = (data_1 - data)/e_1
g2 = (data_2 - data)/e_2
G = np.column_stack([g0, g1, g2])
# solve for the parameters
P = np.linalg.inv(np.linalg.inv(Q) + np.transpose(G) @ np.linalg.inv(R) @ G)
eta_soln = P@np.transpose(G)@np.linalg.inv(R)@y_d
return(eta_soln)
Note that in the above function, the perturbations to the parameters are done stochastically rather that prescribed as in the example above.
Next, we can define a loop to run this process iteratively:
# define the first-guess parameters and model solution
h_0 = 2
v_0 = 17
g = -10
v, x = M(t_model, delta_t_model, h_0, v_0, g)
# run the Green's function approximation many times
iterations = 100
for i in range(iterations):
eta_a = Greens_function_optimization(t_model, v, x)
h_0 += eta_a[0]
v_0 += eta_a[1]
g += eta_a[2]
v, x = M(t_model, delta_t_model, h_0, v_0, g)
print('After '+str(iterations)+' iterations, the optimized parameters are:')
print(' h_0: '+'{:.4f}'.format(h_0)+' m')
print(' v_0: '+'{:.4f}'.format(v_0)+' m/s')
print(' g: '+'{:.4f}'.format(g)+' m/s^2')
After 100 iterations, the optimized parameters are:
h_0: 3.0000 m
v_0: 15.0000 m/s
g: -9.8000 m/s^2
As we can see, applying the process many times over yields a convergence in the parameters to the true solution. This is attainable because the data was sampled exactly from the true solution.